Biography
SDE (Software Development Engineer) at AWS (Amazon Web Services). JHU Alumni.
Interests
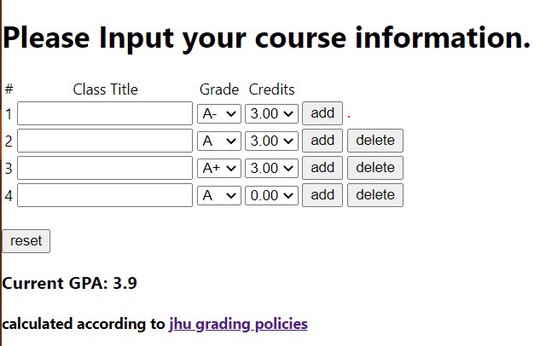
- Web Development
- Software Engineering
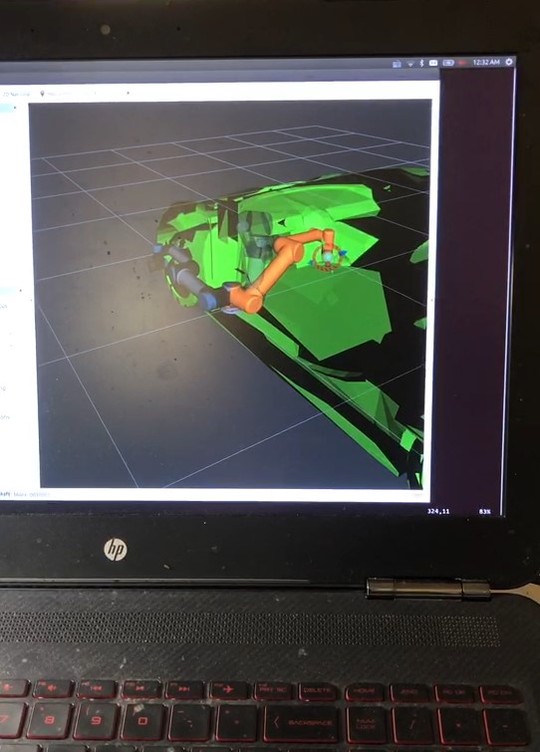
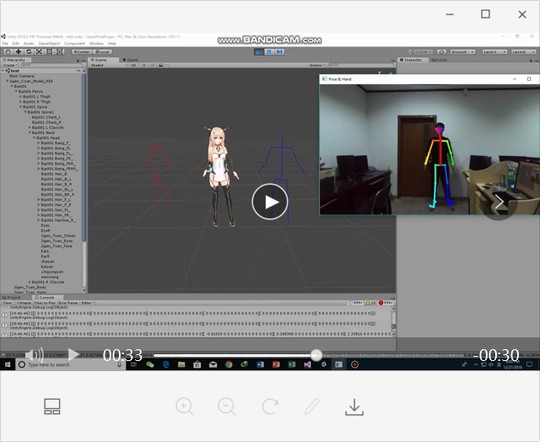
- Robotics
- Machine Learning
Education
-
M.S.E. in Computer Science, 2020
Johns Hopkins University
-
BSc in Computer Science, 2019
Beijing Institute of Technology